3
我正在尋找一些算法(最好是如果源代碼可用) 圖像註冊。 圖像變形不能用單應性矩陣來描述(因爲我認爲變形不是對稱的而且不是均勻的),更具體地說,變形就像桶/變形和梯形失真,可能是圖像的一些旋轉。 我想獲得兩個圖像的像素對,所以我可以獲得「變形場」的表示。圖像配準(非剛性非線性)
我google很多,發現有一些算法基於一些phisics的想法,但它似乎可以匯聚 本地最大值,但不是全球。 我可以affort程序是半自動的,它意味着一些簡單的用戶interation。
也許像SIFT這樣的算法會合適嗎?但我認爲它不能提供具有規則足夠密度的「變形場」。
如果它很重要,沒有規模變化。複雜的領域 http://www.math.ucla.edu/~yanovsky/Research/ImageRegistration/2DMRI/2DMRI_lambda400_grid_only1.png
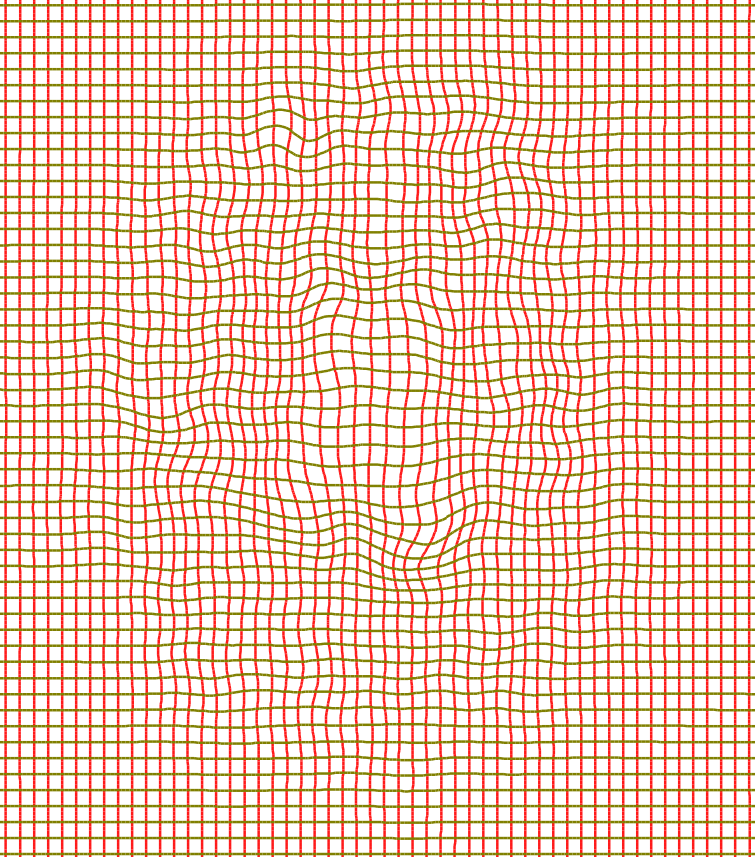{kind=link}
兩個備註: 1. SIFT不是一個圖像配准算法。這是計算圖像中局部特徵的算法。在您的情況下獲取匹配像素對可能會有所幫助。 2.你有轉型的數學模型嗎? – 2012-04-25 11:27:20
我知道SIFT,但我認爲如果我有高密度的興趣點對,我可以插入其他像素。 理論上我有變形的總和 桶/枕形 u = x + Const *(x * x + y * y)* x; v = y + Const *(x * x + y * y)* y; u =(m11 * x + m12 * y + m13);以及梯形 。 v =(m21 * x + m22 * y + m23); rotation u = x * cosa-y * sina; v = x * sina + y * cosa; – mrgloom 2012-04-25 11:41:54